Тъй като работата с роботи ще бъде усилие за разработка, повечето инструменти, от които се нуждаете, ще бъдат комплекти инструменти за разработка. Фондацията за робототехника с отворен код (OSRF) има страхотна уеб страница с ресурси. Те поддържат и поддържат операционната система за роботика (ROS). Това е огромна колекция от инструменти, които можете да инсталирате както на съществуващата си система, така и като контейнер.
Мотивите зад разпределението
Когато започнете да експериментирате с роботи, ще откриете много неща, които не сте очаквали, когато сте започнали. Осъзнавате ли колко важни са интерпретациите на изображения за развитието на роботиката? В дистрибуцията имате всички инструменти, от които ще се нуждаете, преди да разберете, че имате нужда от тях.
Това улеснява започването и избягва усложнения, тъй като проектите се развиват. Ще заемете дисково пространство ненужно, но общият размер на системата не е голям за съвременен компютър. Докато напредвате във вашия проект, уверете се, че знаете какво да поставите в робота и не. Ограниченията на дисковото пространство там са много по-строги.
ROS - най-големият и очевиден избор
Както бе споменато по-рано, ROS има богата библиотека от функции. Те варират от хардуерен контрол, съобщения между подсистемите до библиотеки на зрението и симулатори. Проектът е добре подкрепен от OSRF. Те от своя страна са подкрепени от много лидери в бранша, а тяхното търговско дъщерно дружество подкрепя същите компании в техните усилия.
Въпреки широкия набор от възможности за избор и високото ниво на изтънченост, нов потребител може да започне да използва някои стандартни компоненти. Благодарение на кооперативните методи на OSRF има много роботи, които са построени с помощта на ROS. Много от тях са потребителски продукти, които можете да закупите за разумна сума и да стартирате проекта си за конкретна задача. Наличните в момента продукти са един на колела, крака и крила на летящи дронове. Можете дори да намерите обитатели на вода, включително подводници.
Този проект ще ви продължи до индустриална употреба, ако искате да отидете там. Започва малко крива на обучение, но така или иначе има какво да научите за роботиката. Всъщност, когато планирате първия си проект, със сигурност ще пропуснете много функции, от които се нуждаете само за основно използване.
Инструментарий за програмиране на мобилна роботика
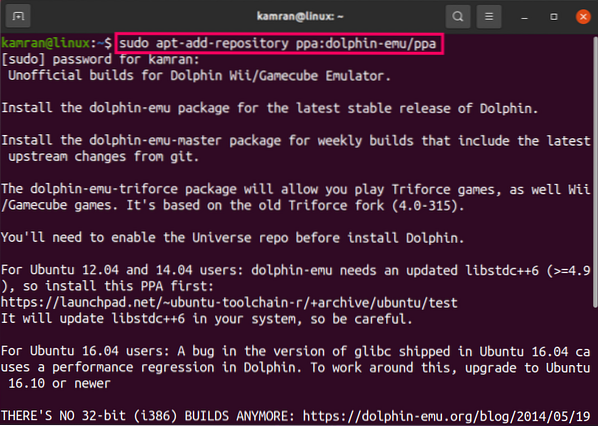
Както ще видите, когато започнете с роботи, голяма част от работата ще бъде програмиране. Този набор от инструменти ви помага със SLAM (едновременно локализиране и картографиране) и други инструменти за планиране на пътя. Много от инструментите са свързани с визията. интересна част от този комплект инструменти е поддръжката на хардуера Kinect. Библиотеките libfreenect са основните за този проект. За да го добавите към вашата инсталация на Ubuntu, можете да вземете PPA и да го инсталирате с apt. Компилирането на вашия собствен изисква gcc-7 или по-нова, clang-4 или по-нова. За повече информация и какво трябва да направите, когато използвате ROS, отидете на страницата им в GitHub.
ЯРП
Наречен „Yet Another Robot Platform“, той се основава на идеята да използвате възможно най-много съществуващи инструменти. YARP е колекция от C ++ библиотеки, която дефинира комуникационни протоколи за всички нива на роботизирани проекти. Имате три компонента на YARP, YARPos, YARPsig и YARPdev. Всички те се занимават с това как да изпращат данни между компонентите на вашия проект. Компонентът YARPos създава интерфейси към операционната система, която използвате. Това улеснява превключването на операционната система или хардуера на един компонент, като същевременно запазва същите YARP потоци от данни. Това е необходимо за стартиране на останалите части на системата. YARPsig се справя със задачи за обработка на сигнали, той взаимодейства с OpenCV и подобни библиотеки. Не извършва обработката. YARPdev осигурява интерфейси за всякакви устройства, от които се нуждаете. Помислете за камери, микрофони, драйвери за двигатели и др. YARP ще направи интерфейса към цялостната система. Ще го използвате и за конфигуриране на вашите устройства. YARP ще ви помогне да планирате целия друг софтуер, за да можете да използвате съществуващото там. Всъщност вие също имате възможност да стартирате някои компоненти под ROS, докато други работят с YARP. Налични са много опции и можете да превключвате между двете постепенно.
Заключение
Когато започнете с роботиката, ще ви трябват много софтуерни части. Всеки контролер и вграден компютър имат различни нужди и системи. Всяка камера има нов драйвер. Всички данни трябва да се движат между подсистемите и компонентите. Става наистина сложно. За да започнете по-бързо, трябва да имате система, която да координира всичко. Правите това, като имате координираща функция за съобщения и данни. Те са организирани като „теми“, „възли“ и „услуги“. Причината за тези различни функции е, че понякога искате да изпълните команди, понякога искате да направите данните достъпни за много други части на системата и също така ще можете да изпратите всички данни към системата като цяло.
Тук се нуждаете от дистрибуция или платформа, която поддържа всичко това координирано. ROS е системата, която работи с повечето, ако не и с всички хардуер и видове проекти. Не забравяйте да разберете какво се опитвате да постигнете с вашия дизайн. Това е особено важно, когато учите. Ако имате цел, тогава всички стъпки имат причина и връзка. Това са основите на обучението; За да видите връзката между разума и действието.